« The level of safety to be ensured by automated/autonomous vehicles shall be at least equal to the one ensured by a competent and careful human driver. »
UNECE, WP.29/GRVA/2020/32 – “Revised Framework Document on Automated/Autonomous Vehicles”
Today
Regulation
Homologation and certification are crucial, but not sufficient to demonstrate the security of the autonomous vehicle trajectories.
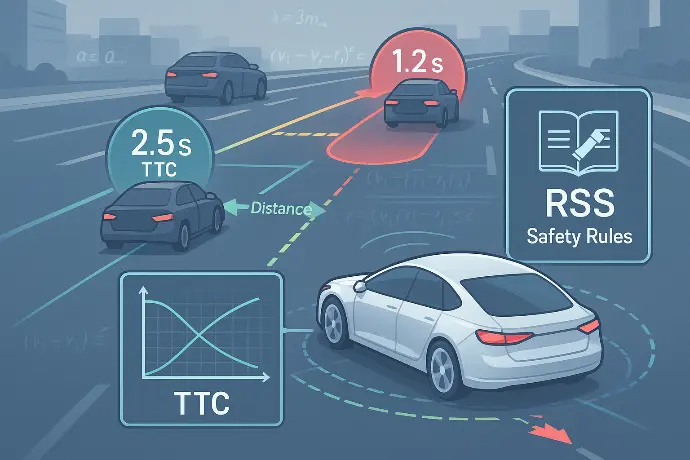
Various criteria
A lot of security criteria exist to evaluate autonomous vehicle trajectories. There is a lack of a unique, explicable, physical criterion.
Massive simulation
Statistics over massive simulation is a costly answer. Problematic scenarios have still to be deeply analysed with the other criteria.


A detailed and explainable analysis without massive computing

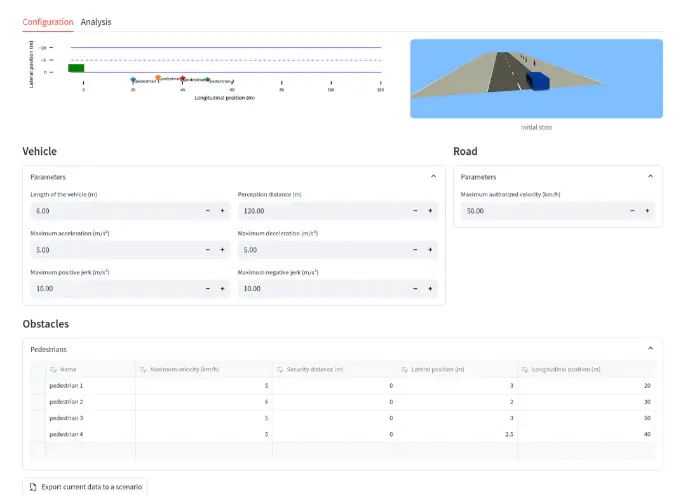
A configurable software to test different hypotheses
Going beyond regulations, with a physical analysis
Our Solution
take into account the uncertainty about the future evolution of obstacles, and the limited capabilities of the vehicle, to deduce the worst-case scenario and the corresponding unavoidable impact speed. This is the severity of the risk.
Products
PoCs
Get the opportunity to adapt our solution to your needs.
Services

Mobpti solution is based on the Mobpti library. With its Python API, this library can be used in risk analysis official or custom methods.